FUSION-BASED WAYFINDING PREDICTION MODEL FOR MULTIPLE INFORMATION SOURCES
Dubey, Rohit K., Samuel S. Sohn, Christoph Hoelscher, and Mubbasir Kapadia. “Fusion-Based Wayfinding Prediction Model for Multiple Information Sources.” In 2019 22th International Conference on Information Fusion (FUSION), pp. 1-8. IEEE, 2019.
In an unfamiliar indoor environment, navigation mostly depends on picking up relevant wayfinding information from various environmental sources.
The complex wayfinding process involves information processing, which consists of decision-making based on information fusion from multiple sources and decision execution. In this paper, we propose an agent wayfinding prediction framework at intersections of variable route choices by dynamic information fusion under the influence of $N$ directional information sources.
We evaluate two proposed methods of fusing information for wayfinding prediction, where one relies on Dempster-Shafer Theory to quantify the discrepancy between the evidence and the other is an information-theoretical method, which serves as a sanity check.
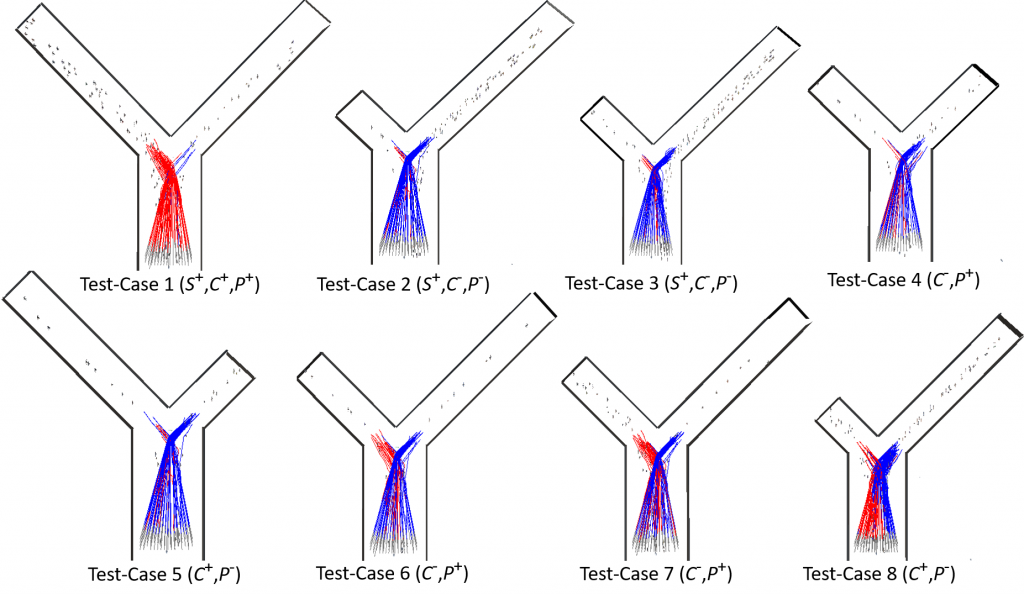
The simulated trajectories and prediction results for different combinations of information sources (i.e., signage, crowd flow, and spatial layout) and numbers of route choices provide evidence that the proposed frameworks simulate wayfinding decision-making as a dynamic process which is modulated by the presence of information sources and the temporal gain in prediction confidence.