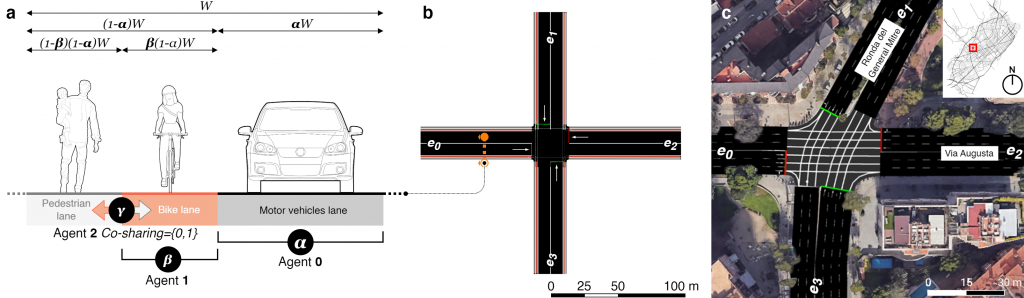
COOPERATIVE ADAPTABLE LANES FOR SAFER SHARED SPACE AND IMPROVED MIXED-TRAFFIC FLOW
DEMOCRACY BY DESIGN: PERSPECTIVES FOR DIGITALLY ASSISTED, PARTICIPATORY UPGRADES OF SOCIETY

AUTOSIGN: A MULTI-CRITERIA OPTIMIZATION APPROACH TO COMPUTER-AIDED DESIGN OF SIGNAGE LAYOUTS IN COMPLEX BUILDINGS
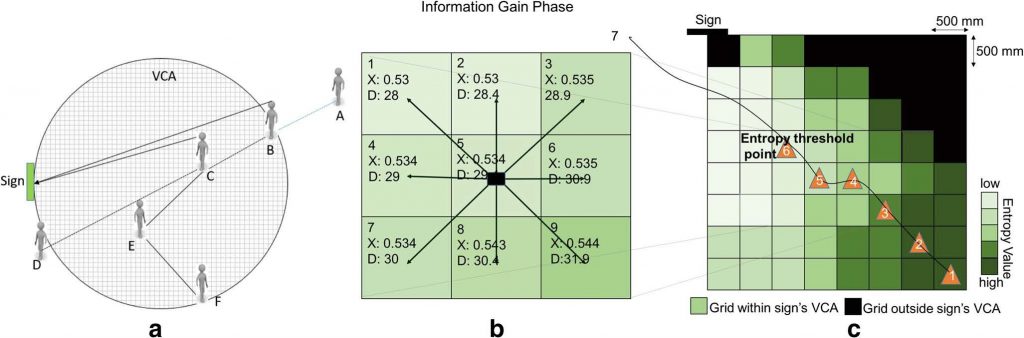
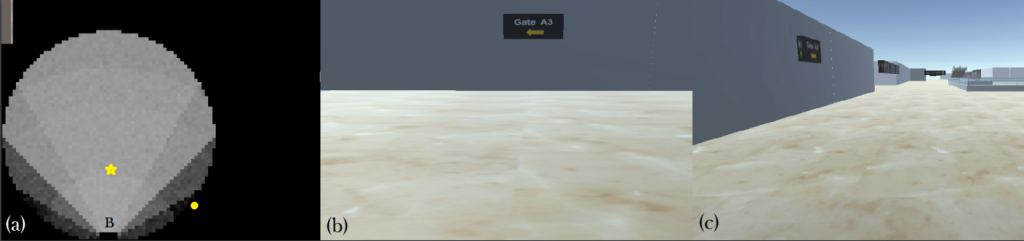
INFORMATION THEORETIC MODEL TO SIMULATE AGENT-SIGNAGE INTERACTION FOR WAYFINDING

IDENTIFYING INDOOR NAVIGATION LANDMARKS USING A HIERARCHICAL MULTI-CRITERIA DECISION FRAMEWORK

Dubey, Rohit K., Samuel S. Sohn, Tyler Thrash, Christoph Hoelscher, and Mubbasir Kapadia. “Identifying indoor navigation landmarks using a hierarchical multi-criteria decision framework.” In Motion, Interaction and Games, pp. 1-11. 2019.
FUSION-BASED WAYFINDING PREDICTION MODEL FOR MULTIPLE INFORMATION SOURCES

Dubey, Rohit K., Samuel S. Sohn, Christoph Hoelscher, and Mubbasir Kapadia. “Fusion-Based Wayfinding Prediction Model for Multiple Information Sources.” In 2019 22th International Conference on Information Fusion (FUSION), pp. 1-8. IEEE, 2019.
COGNITIVE AGENT BASED SIMULATION MODEL FOR IMPROVING DISASTER RESPONSE PROCEDURES

Dubey, Rohit K. “Cognitive Agent Based Simulation Model For Improving Disaster Response Procedures.” In Neural Information Processing Systems: Workshop on AI for Humanitarian Assistance and Disaster Response. NeurIPS 2019.
TOWARDS AN INFORMATION-THEORETIC FRAMEWORK FOR QUANTIFYING WAYFINDING INFORMATION IN VIRTUAL ENVIRONMENTS
Dubey, Rohit K., Mubbasir Kapadia, Tyler Thrash, Victor R. Schinazi, and Christoph Hoelscher. “Towards an Information-Theoretic Framework for Quantifying Wayfinding Information in Virtual Environments.” In CAID@ IJCAI, pp. 40-46. 2017.
AN IMMERSIVE MULTI-AGENT SYSTEM FOR INTERACTIVE APPLICATIONS

Wang, Yanbin, Rohit Dubey, Nadia Magnenat-Thalmann, and Daniel Thalmann. “An immersive multi-agent system for interactive applications.” The Visual Computer 29, no. 5 (2013): 323-332.
